
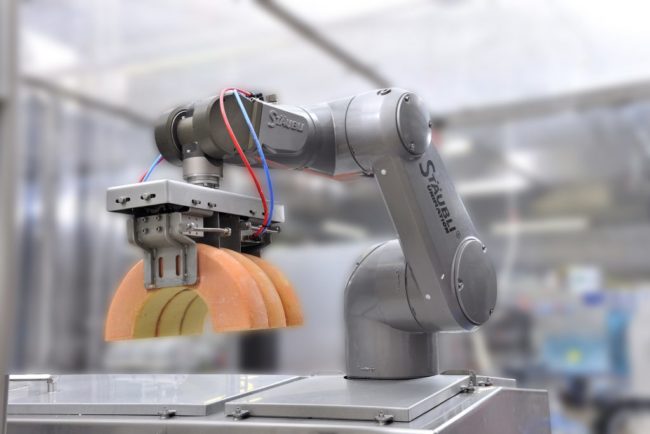
Soft grippers for cobot arm
Soft grippers for cobot arm @ Food Tech Brainport, the Netherlands Components: Pneumatic demo model with two or more soft gripping fingers A soft gripper (of Soft Robotics), either fixed to a cobot arm or as a stand-alone is used to pick up various food produce. The fingers can be assembled from two up to…








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}