
Bin picker
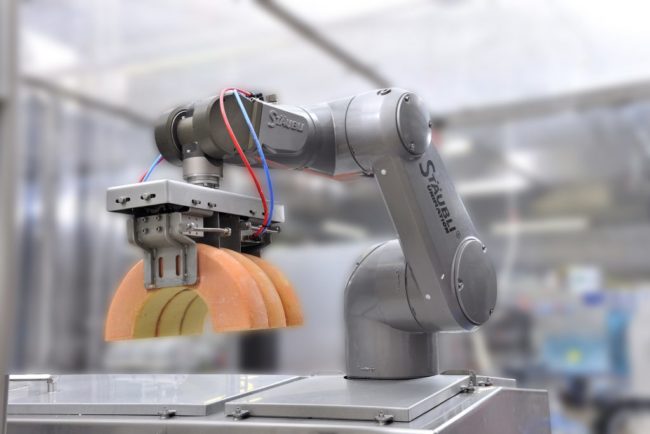
Bin picker @ Food Tech Brainport, the Netherlands Components: Bin picker, sachets, inline A bin picker that can pick randomly ordered sachets of salt & pepper, sauce or sesame seeds and place them in e.g. salads or ready meals for supermarkets. The sachets can be picked at high speed randomly out of a bin. Technology…








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}